18884710760

技术文章
一、引言
在机器人开发的链条里,仿真往往是被低估却又绕不开的一环。物理样机昂贵、迭代缓慢、试错成本高,而一个高质量的仿真环境能让算法、结构、控制策略在进入硬件之前就完成大量验证。
CoppeliaSim(前身为 V-REP)正是这一领域中经久不衰的代表。它由瑞士 Coppelia Robotics 开发,以“分布式控制架构"和“高度开放的接口体系"著称,既能满足科研人员对算法快速验证的需求,也能作为高校机器人课程的教学平台。
本文将从架构理念出发,系统梳理 CoppeliaSim 的核心功能模块,并结合典型应用案例,呈现它的能力全景。
二、分布式控制架构的设计理念
理解 CoppeliaSim,首先要理解它区别于多数仿真器的核心设计——分布式控制。
在传统仿真器中,控制逻辑往往集中在一个外部主程序里统一调度。而 CoppeliaSim 允许场景中的每个对象(关节、传感器、机器人)挂载各自独立的控制代码,这些代码可以以多种方式运行:
嵌入式脚本(Lua):直接附着在场景对象上,随仿真步进执行,适合快速原型;
插件(C/C++):编译为动态库,提供高性能的底层功能扩展;
远程 API 客户端:外部程序通过网络接口控制仿真;
ROS/ROS2 节点:将仿真无缝接入机器人中间件生态;
附加组件(Add-ons):扩展 IDE 自身功能。
这种“哪里需要控制、就在哪里写控制"的模式,使得复杂多机器人系统的建模变得自然——每个机器人各自封装行为,彼此解耦,符合单一职责与高内聚低耦合的工程直觉。
三、核心功能模块
1、多物理引擎支持
CoppeliaSim 没有把自己绑定在单一物理引擎上,而是集成了Bullet、ODE、Newton、Vortex、MuJoCo 等多款引擎,用户可在运行时一键切换。
这一设计具有实用价值:不同引擎在刚体动力学、关节约束、接触求解上各有所长,Bullet 与 ODE 适合通用快速仿真,Vortex 偏向高精度工业级动力学,MuJoCo 则在接触丰富的操作与强化学习场景中表现优异。研究者可以用同一套场景对比不同引擎的结果,评估算法的鲁棒性。
2、多语言编程接口
脚本层默认使用 Lua,轻量且嵌入方便;但 CoppeliaSim 的开放性体现在它对外暴露了统一的 API,可被 Python、C/C++、Java、MATLAB、Octave 等多种语言调用。其中 Python 接口尤其受欢迎,配合丰富的科学计算生态(NumPy、PyTorch 等),让仿真与算法研究形成闭环。
接口形态上,新版本主推基于 ZeroMQ 的 Remote API,相比早期的 Legacy Remote API,它支持几乎全部内部函数调用、延迟更低、使用更简洁,是当前推荐的外部控制方式。
3、运动学:正逆解与冗余求解
机械臂开发中频的需求之一就是运动学求解。CoppeliaSim 内置了通用的正向/逆向运动学(FK/IK)模块,支持任意关节链的配置,能处理冗余自由度、多目标约束以及避奇异点的阻尼最小二乘求解。
用户无需自行推导 D-H 参数和雅可比,只需在场景中定义 IK 组,即可实时求解末端位姿对应的关节角度,极大降低了机械臂控制的入门门槛。
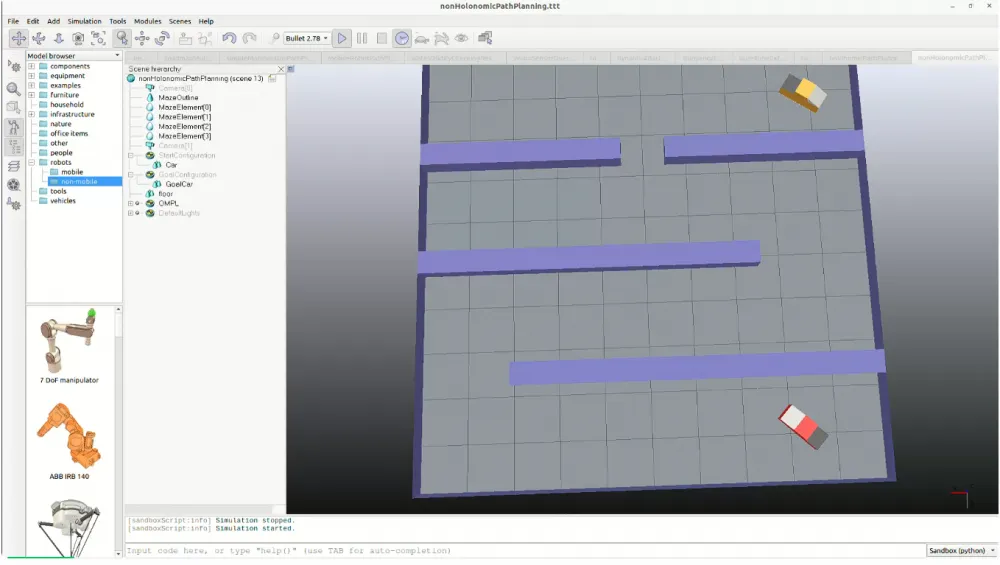
4、路径与运动规划
借助集成的OMPL(Open Motion Planning Library),CoppeliaSim 提供了 RRT、PRM 等主流采样式运动规划算法。结合内置的碰撞检测,可以在带障碍的工作空间中为机械臂或移动机器人自动生成无碰撞路径。这使得抓取、装配、导航等任务的可行性验证变得直接可视。
5、碰撞检测与距离计算
CoppeliaSim 内置高效的碰撞检测与最小距离计算功能,基于优化的网格层级结构,能够实时报告任意两组对象之间是否碰撞及其最近距离。这是安全验证、避障算法、接触判断的基础设施。
6、丰富的传感器模型
传感器是连接仿真与感知算法的桥梁。CoppeliaSim 提供了完整的传感器家族:
视觉传感器:可输出 RGB 图像与深度图,支持图像滤波链,适配计算机视觉与视觉伺服研究;
激光/距离传感器:模拟红外、超声、激光雷达的探测;
力/力矩传感器:测量关节或接触处的受力;
位置/视觉惯性等其他传感器。
这些传感器输出的数据可直接喂给感知与控制算法,构成“感知—决策—执行"的完整仿真回路。
7、网格处理与建模
平台支持导入 URDF、SDF、Collada、OBJ、STL 等主流模型与网格格式,并提供网格凸分解、简化、纹理处理等编辑能力。用户既可以直接拖入现成的机器人模型,也能在内置的模型库中快速取用 UR、Franka、KUKA、TurtleBot 等常见平台。

通过插件,CoppeliaSim 可以作为 ROS/ROS2 节点发布与订阅话题、提供服务,与真实机器人栈共用同一套通信范式。这意味着在仿真中调试通过的导航、SLAM、MoveIt 流程,可以较平滑地迁移到实物上,显著缩短 sim-to-real 的距离。
四、典型应用案例
案例一:机械臂抓取算法验证
在场景中加载机械臂,用 Python 通过 ZeroMQ Remote API 控制。借助内置 IK 求解目标位姿、OMPL 规划无碰撞路径、碰撞检测保证安全,再用视觉传感器获取物体位姿,完成一次“看见—规划—抓取"的全流程验证——全部无需触碰真实硬件。

案例二:移动机器人导航教学
在高校课程中,学生用 TurtleBot 模型搭建带障碍的室内场景,接入 ROS2 与 SLAM、Nav2 栈,直观观察建图与路径规划过程。仿真环境零硬件成本、可无限重置,非常契合教学的试错节奏。
五、总结
总结来看,CoppeliaSim 是一款以分布式控制架构为内核、以开放接口为特色的机器人仿真平台。它集成多款物理引擎,支持 Lua、Python、C/C++ 等多语言编程,内置正逆运动学、OMPL 运动规划、碰撞检测、视觉与力觉等传感器模型,并能通过 ZeroMQ Remote API 与 ROS/ROS2 接入外部算法生态。
无论是机械臂抓取、强化学习训练、移动机器人导航,还是多机器人协同,它都能在不触碰实物硬件的前提下完成高效验证。此外,凭借开放、灵活、跨平台且对教育免费的特点,CoppeliaSim 成为连接算法研究与教学实践的有力工具——用对场景,它能把昂贵而缓慢的硬件试错,转化为快速、可复现的数字迭代。
 关注微信
关注微信